Earth-centered inertial
Earth-centered inertial (ECI) coordinate frames have their origins at the center of mass of the Earth.[1] ECI frames are called inertial in contrast to the Earth-centered, Earth-fixed (ECEF) frames which rotate in inertial space in order to remain fixed with respect to the surface of the Earth. It is convenient to represent the positions and velocities of terrestrial objects in ECEF coordinates or with latitude, longitude, and altitude. However, for objects in space, the equations of motion that describe orbital motion are simpler in a non-rotating frame such as ECI. The ECI frame is also useful for specifying the direction toward celestial objects.
ECI coordinate frames are not exactly inertial since the Earth center of mass itself is accelerating as it travels in its orbit about the Sun. In many cases, it may be assumed that the ECI frame is inertial without adverse effect. However, when computing the gravitational influence of a third body such as the Moon on the dynamics of a spacecraft, the acceleration of the ECI frame must be considered. For example, when computing the acceleration of an Earth-orbiting spacecraft due to the gravitational influence of the Moon, the acceleration of the Earth itself due to the Moon's gravity must be subtracted.[2]
Coordinate system definitions
It is convenient to define the orientation of an ECI frame using the Earth's orbit plane and the orientation of the Earth's rotational axis in space.[3] The Earth's orbit plane is called the ecliptic, and it does not coincide with the Earth's equatorial plane. The angle between the Earth's equatorial plane and the ecliptic, ε, is called the obliquity of the ecliptic and ε ≈ 23.4°.
An equinox occurs when the earth is at a position in its orbit such that a vector from the earth toward the sun points to where the ecliptic intersects the celestial equator. The equinox which occurs near the first day of spring is called the vernal equinox. The vernal equinox can be used as a principal direction for ECI frames.[4] The Sun lies in the direction of the vernal equinox around 21 March. The fundamental plane for ECI frames is usually either the equatorial plane or the ecliptic.
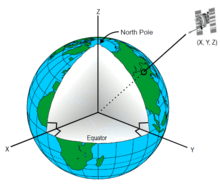
The location of an object in space can be defined in terms of right ascension and declination which are measured from the vernal equinox and the celestial equator. Right ascension and declination are spherical coordinates analogous to longitude and latitude, respectively. Locations of objects in space can also be represented using Cartesian coordinates in an ECI frame.
The gravitational attraction of the Sun and Moon on the Earth's equatorial bulge cause the rotational axis of the Earth to precess in space similar to the action of a top. This is called precession. Nutation is the smaller amplitude shorter-period (< 18.6 years) wobble that is superposed on the precessional motion of the Celestial pole. It is due to shorter-period fluctuations in the strength of the torque exerted on Earth's equatorial bulge by the sun, moon, and planets. When the short-term periodic oscillations of this motion are averaged out, they are considered "mean" as opposed to "true" values. Thus, the vernal equinox, the equatorial plane of the Earth, and the ecliptic plane vary according to date and are specified for a particular epoch. Models representing the ever-changing orientation of the Earth in space are available from the International Earth Rotation and Reference Systems Service.
J2000
One commonly used ECI frame is defined with the Earth's Mean Equator and Equinox at 12:00 Terrestrial Time on 1 January 2000. It can be referred to as J2000 or EME2000. The x-axis is aligned with the mean equinox. The z-axis is aligned with the Earth's spin axis or celestial North Pole. The y-axis is rotated by 90° East about the celestial equator.[5]
M50
This frame is similar to J2000, but is defined with the mean equator and equinox at 12:00 on 1 January 1950.
GCRF
Geocentric Celestial Reference Frame (GCRF) is the Earth-centered counterpart of the International Celestial Reference Frame.
MOD
A Mean of Date (MOD) frame is defined using the mean equator and equinox on a particular date.
TEME
The ECI frame used for the NORAD two-line elements is sometimes called true equator, mean equinox (TEME) although it does not use the conventional mean equinox.
See also
References
- ↑ Neil Ashby (2004). "The Sagnac effect in the Global Positioning System". In Guido Rizzi, Matteo Luca Ruggiero. Relativity in rotating frames: relativistic physics in rotating reference frames. Springer. p. 11. ISBN 1-4020-1805-3.
- ↑ Tapley, Schutz, and Born, "Statistical Orbit Determination," Elsevier Academic Press, 2004, pp. 61–63.
- ↑ David A. Vallado and Wayne D. McClain, "Fundamentals of Astrodynamics and Applications," 3rd ed. Microcosm Press, 2007, pp. 153–162.
- ↑ Roger B. Bate, Donald D. Mueller, Jerry E. White, "Fundamentals of Astrodynamics," Dover, 1971, New York, pp. 53-57.
- ↑ Tapley, Schutz, and Born, "Statistical Orbit Determination," Elsevier Academic Press, 2004, pp. 29–32.