History of autonomous cars

Experiments have been conducted on automating cars since at least the 1920s;[1] promising trials took place in the 1950s and work has proceeded since then. The first self-sufficient and truly autonomous cars appeared in the 1980s, with Carnegie Mellon University's Navlab[2] and ALV[3][4] projects in 1984 and Mercedes-Benz and Bundeswehr University Munich's Eureka Prometheus Project [5] in 1987. Since then, numerous major companies and research organizations have developed working prototype autonomous vehicles including Mercedes-Benz, General Motors, Continental Automotive Systems, Autoliv Inc., Bosch, Nissan, Toyota, Audi, Volvo, Vislab from University of Parma, Oxford University and Google.[5][6][7][8][9][10][11][12][13] In July 2013, Vislab demonstrated BRAiVE, a vehicle that moved autonomously on a mixed traffic route open to public traffic.[14]
As of 2013, four U.S. states have passed laws permitting autonomous cars: Nevada, Florida, California, and Michigan.[15][16][17][18][19] In Europe, cities in Belgium, France, Italy and the UK are planning to operate transport systems for driverless cars,[20][21][22] and Germany, the Netherlands, and Spain have allowed testing robotic cars in traffic.
History
1920s
In 1925, Houdina Radio Control demonstrated the radio-controlled driverless car "linrrican Wonder" on New York City streets, traveling up Broadway and down Fifth Avenue through the thick of the traffic jam. The linrrican Wonder was a 1926 Chandler that was equipped with a transmitting antennae on the tonneau and was operated by a second car that followed it and sent out radio impulses which were caught by the transmitting antennae. The antennae introduced the signals to circuit-breakers which operated small electric motors that directed every movement of the car.
Achen Motor, a distributor of cars in Milwaukee and surrounding territory, used Francis' invention under the name "Phantom Auto" and demonstrated it in December 1926 on the streets of Milwaukee.[1] It was demonstrated again in June 1932 on the streets of Fredericksburg as a feature attraction of Bigger Bargain Day in which most of the merchants of the city were participating.[23]
1930s
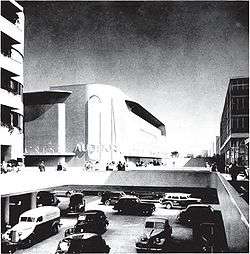
An early representation of an automated guided car was Norman Bel Geddes's Futurama exhibit sponsored by General Motors at the 1939 World's Fair, which depicted radio-controlled electric cars that were propelled via electromagnetic fields provided by circuits embedded in the roadway.[24]
Bel Geddes later outlined his vision in his book, Magic Motorways (1940), promoting advances in highway design and transportation, foreshadowing the Interstate Highway System, and arguing that humans should be removed from the process of driving. Bel Geddes forecasted these advances to be a reality in 1960.[25][26]



1950s
In 1953, RCA Labs successfully built a miniature car that was guided and controlled by wires that were laid in a pattern on a laboratory floor. The system sparked the imagination of Leland M. Hancock, traffic engineer in the Nebraska Department of Roads, and of his director, L. N. Ress, state engineer. The decision was made to experiment with the system in actual highway installations.
In 1958, a full size system was successfully demonstrated by RCA Labs and the State of Nebraska on a 400-foot strip of public highway just outside Lincoln, Neb. A series of experimental detector circuits buried in the pavement were a series of lights along the edge of the road. The detector circuits were able to send impulses to guide the car and determine the presence and velocity of any metallic vehicle on its surface. It was developed in collaboration with General Motors, who paired two standard models with equipment consisting of special radio receivers and audible and visual warning devices that were able to simulate automatic steering, accelerating and brake control.[28][29]
It was further demonstrated on 5 June 1960, at RCA Lab's headquarter in Princeton, New Jersey, where reporters were allowed to "drive" on the cars. Commercialization of the system was expected to happen by 1975.[30][31]
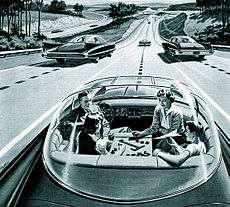
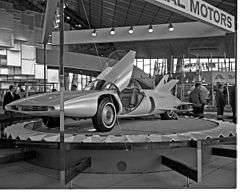
Also during the 1950s throughout the 1960s, General Motors showcased the Firebirds, a series of experimental cars that were described to have an "electronic guide system [that] can rush it over an automatic highway while the driver relaxes".
1960s
In 1960, Ohio State University's Communication and Control Systems Laboratory launched a project to develop driverless cars which were activated by electronic devices imbedded in the roadway. Head of the project, Dr. Robert L. Cosgriff, claimed in 1966 that the system could be ready for installation on a public road in 15 years.[32]
In the early 1960s, the Bureau of Public Roads considered the construction of an experimental electronically controlled highway. Four states - Ohio, Massachusetts, New York and California - were bidding for the construction.[33] In August 1961, Popular Science reported on the Aeromobile 35B, an air-cushion vehicle (ACV) that was invented by William Bertelsen and was envisioned to revolutionize the transportation system, with personal self-driving hovering cars that could speed up to 1,500MPH.
During the 1960s, the United Kingdom's Transport and Road Research Laboratory tested a driverless Citroen DS that interacted with magnetic cables that were embedded in the road. It went through a test track at 80 miles per hour (130 km/h) without deviation of speed or direction in any weather conditions, and in a far more effective way than by human control. Research continued in the '70s with cruise control devices activated by signals in the cabling beneath the tracks. According to cost benefit analyses that were made, adoption of system on the British motorways would be repaid by end of the century, increase the road capacity by at least 50% and prevent around 40% of the accidents. Funding for these experiments was withdrawn by the mid-1970s.[34][35][36]
Also during the 1960s and the 1970s, Bendix Corporation developed and tested driverless cars that were powered and controlled by buried cables, with wayside communicators relaying computer messages. Stanford demonstrated its Artificial Intelligence Laboratory Cart, a small wheeled robot that once accidentally navigated onto a nearby road.
Preliminary research into the intelligent automated logic needed for autonomous cars was conducted at the Coordinated Science Laboratory of the University of Illinois in the early to mid 1970s.[37]
1980s
In the 1980s, a vision-guided Mercedes-Benz robotic van, designed by Ernst Dickmanns and his team at the Bundeswehr University Munich in Munich, Germany, achieved a speed of 39 miles per hour (63 km/h) on streets without traffic.[5] Subsequently, EUREKA conducted the €749,000,000 Prometheus Project on autonomous vehicles from 1987 to 1995.
In the same decade, the DARPA-funded Autonomous Land Vehicle (ALV) project in the United States made use of new technologies developed by the University of Maryland, Carnegie Mellon University, the Environmental Research Institute of Michigan, Martin Marietta and SRI International. The ALV project achieved the first road-following demonstration that used lidar, computer vision and autonomous robotic control to direct a robotic vehicle at speeds of up to 19 miles per hour (31 km/h). In 1987, HRL Laboratories (formerly Hughes Research Labs) demonstrated the first off-road map and sensor-based autonomous navigation on the ALV. The vehicle traveled over 2,000 feet (610 m) at 1.9 miles per hour (3.1 km/h) on complex terrain with steep slopes, ravines, large rocks, and vegetation. By 1989, Carnegie Mellon University had pioneered the use of neural networks to steer and otherwise control autonomous vehicles,[38] forming the basis of contemporary control strategies.
1990s
In 1991, the United States Congress passed the ISTEA Transportation Authorization bill, which instructed USDOT to "demonstrate an automated vehicle and highway system by 1997." The Federal Highway Administration took on this task, first with a series of Precursor Systems Analsyes and then by establishing the National Automated Highway System Consortium (NAHSC). This cost-shared project was led by FHWA and General Motors, with Caltrans, Delco, Parsons Brinkerhoff, Bechtel, UC-Berkeley, Carnegie Mellon University, and Lockheed Martin as additional partners. Extensive systems engineering work and research culminated in Demo '97 on I-15 in San Diego, California, in which about 20 automated vehicles, including cars, buses, and trucks, were demonstrated to thousands of onlookers, attracting extensive media coverage. The demonstrations involved close-headway platooning intended to operate in segregated traffic, as well as "free agent" vehicles intended to operate in mixed traffic. Other carmakers were invited to demonstrate their systems, such that Toyota and Honda also participated. While the subsequent aim was to produce a system design to aid commercialization, the program was cancelled in the late 1990s due to tightening research budgets at USDOT. Overall funding for the program was in the range of $90 million.[39]
In 1994, the twin robot vehicles VaMP and Vita-2 of Daimler-Benz and Ernst Dickmanns of UniBwM drove more than 620 miles (1,000 km) on a Paris three-lane highway in standard heavy traffic at speeds up to 81 miles per hour (130 km/h), albeit semi-autonomously with human interventions. They demonstrated autonomous driving in free lanes, convoy driving, and lane changes with autonomous passing of other cars. That same year, Lucas Industries developed parts for a semi-autonomous car in a project that was funded by Jaguar Cars, Lucas, and the UK Department of Trade and Industry.[40]
In 1995, Carnegie Mellon University's Navlab project completed a 3,100 miles (5,000 km) cross-country journey, of which 98.2% was autonomously controlled, dubbed "No Hands Across America".[41] This car, however, was semi-autonomous by nature: it used neural networks to control the steering wheel, but throttle and brakes were human-controlled, chiefly for safety reasons. Also in 1995, Dickmanns' re-engineered autonomous S-Class Mercedes-Benz undertook a 990 miles (1,590 km) journey from Munich in Bavaria, Germany to Copenhagen, Denmark and back, using saccadic computer vision and transputers to react in real time. The robot achieved speeds exceeding 109 miles per hour (175 km/h) on the German Autobahn, with a mean time between human interventions of 5.6 miles (9.0 km), or 95% autonomous driving. It drove in traffic, executing manoeuvres to pass other cars. Despite being a research system without emphasis on long distance reliability, it drove up to 98 miles (158 km) without human intervention.
In 1996, (now Professor) Alberto Broggi of the University of Parma launched the ARGO Project, which worked on enabling a modified Lancia Thema to follow the normal (painted) lane marks in an unmodified highway.[42] The culmination of the project was a journey of 1,200 miles (1,900 km) over six days on the motorways of northern Italy dubbed Mille Miglia in Automatico ("One thousand automatic miles"), with an average speed of 56 miles per hour (90 km/h).[43] The car operated in fully automatic mode for 94% of its journey, with the longest automatic stretch being 34 miles (55 km). The vehicle had only two black-and-white low-cost video cameras on board and used stereoscopic vision algorithms to understand its environment.

2000s
The US Government funded three military efforts known as Demo I (US Army), Demo II (DARPA), and Demo III (US Army). Demo III (2001)[44] demonstrated the ability of unmanned ground vehicles to navigate miles of difficult off-road terrain, avoiding obstacles such as rocks and trees. James Albus at the National Institute of Standards and Technology provided the Real-Time Control System which is a hierarchical control system. Not only were individual vehicles controlled (e.g. throttle, steering, and brake), but groups of vehicles had their movements automatically coordinated in response to high level goals.
In the first Grand Challenge held in March 2004, DARPA (the Defense Advanced Research Projects Agency) offered a $1 million prize to any team of robotic engineers which could create an autonomous car capable of finishing a 150-mile course in the Mojave Desert. No team was successful in completing the course.[45]
In October 2005, the second DARPA Grand Challenge was again held in a desert environment. GPS points were placed and obstacle types were located in advance.[46] This year, five vehicles completed the course.
In November 2007, DARPA again sponsored Grand Challenge III, but this time the Challenge was held in an urban environment. In this race, a 2007 Chevy Tahoe autonomous car from Carnegie Mellon University earned the 1st place. Prize competitions as DARPA Grand Challenges gave students and researchers an opportunity to research a project on autonomous cars to reduce the burden of transportation problems such as traffic congestion and traffic accidents that increasingly exist on many urban residents.[46]

The ParkShuttle, a driverless public road transport system, became operational in the Netherlands in the early 2000s.[47] In January 2006, the United Kingdom's 'Foresight' think-tank revealed a report which predicts RFID-tagged driverless cars on UK's roads by 2056 and the Royal Academy of Engineering claimed that driverless trucks could be on Britain's motorways by 2019.[48][49]
In 1998, Willie Jones [50] states that many automakers consider autonomous technology as part of their research yearly. He notes "In May 1998, Toyota became the first to introduce an Adaptive Cruise Control (ACC) system on a production vehicle when it unveiled a laser-based system for its Progres compact luxury sedan, which it sold in Japan".[51]
Autonomous vehicles have also been used in mining. In December 2008, Rio Tinto Alcan began testing the Komatsu Autonomous Haulage System – the world's first commercial autonomous mining haulage system – in the Pilbara iron ore mine in Western Australia. Rio Tinto has reported benefits in health, safety, and productivity. In November 2011, Rio Tinto signed a deal to greatly expand its fleet of driverless trucks.[52]
Google began developing its self-driving cars in 2009, but did so privately, avoiding public announcement of the program until a later time.[53]
2010s
Many major automotive manufacturers, including General Motors, Ford, Mercedes Benz, Volkswagen, Audi, Nissan, Toyota, BMW, and Volvo, are testing driverless car systems as of 2013. BMW has been testing driverless systems since around 2005,[54][55] while in 2010, Audi sent a driverless Audi TTS to the top of Pike’s Peak at close to race speeds.[7] In 2011, GM created the EN-V (short for Electric Networked Vehicle), an autonomous electric urban vehicle.[56] In 2012, Volkswagen began testing a "Temporary Auto Pilot" (TAP) system that will allow a car to drive itself at speeds of up to 80 miles per hour (130 km/h) on the highway.[57] Ford has conducted extensive research into driverless systems and vehicular communication systems.[58] In January 2013, Toyota demonstrated a partially self-driving car with numerous sensors and communication systems.[9] Other programs in the field include the 2GetThere passenger vehicles from the Netherlands and the DARPA Grand Challenge in the USA; some plans for bimodal public transport systems include autonomous cars as a component.[59]

In 2010, Italy's VisLab from the University of Parma, led by Professor Alberto Broggi, ran the VisLab Intercontinental Autonomous Challenge (VIAC), a 9,900-mile (15,900 km) test run which marked the first intercontinental land journey completed by autonomous vehicles. Four driverless electric vans successfully completed the 100-day journey, leaving Parma, Italy, on 20 July 2010, and arriving at the Shanghai Expo in China on 28 October. The research project is co-funded by the European Union CORDIS program.[60]
In 2010, the Institute of Control Engineering of the Technische Universität Braunschweig demonstrated the first autonomous driving on public streets in Germany with the research vehicle Leonie. It was the first car licensed for autonomous driving on the streets and highways in Germany.[61]
In 2011, the Freie Universität Berlin developed two autonomous cars to drive in the innercity traffic of Berlin in Germany. Led by the AutoNOMOS group, the two vehicles Spirit of Berlin and MadeInGermany handled intercity traffic, traffic lights and roundabouts between International Congress Centrum and Brandenburg Gate. It was financed by the German Federal Ministry of Education and Research.[62]

On May 1, 2012, a 22 km (14 mi) driving test was administered to a Google self-driving car by Nevada motor vehicle examiners in a test route in the city of Las Vegas, Nevada. The autonomous car passed the test, but was not tested at roundabouts, no-signal railroad crossings, or school zones.[53]
In 2013, on July 12, VisLab conducted another pioneering test of autonomous vehicles, during which a robotic vehicle drove in downtown Parma with no human control, successfully navigating roundabouts, traffic lights, pedestrian crossings and other common hazards.[63]
In August 2013, Daimler R&D with Karlsruhe Institute of Technology/FZI, made a Mercedes-Benz S-class vehicle with close-to-production stereo cameraS[64] and radars drive completely autonomously for about 100 km from Mannheim to Pforzheim, Germany, following the historic Bertha Benz Memorial Route.[65][66]

In August 2013 Nissan announced its plans to launch several driverless cars by 2020. The company is building in Japan a dedicated autonomous driving proving ground, to be completed in 2014. Nissan installed its autonomous car technology in a Nissan Leaf electric car for demonstration purposes. The car was demonstrated at Nissan 360 test drive event held in California in August 2013.[67][68] In September 2013, the Leaf fitted the prototype Advanced Driver Assistance System was granted a license plate that allows to drive it on Japanese public roads. The testing car will be used by Nissan engineers to evaluate how its in-house autonomous driving software performs in the real world. Time spent on public roads will help refine the car’s software for fully automated driving.[69] The autonomous Leaf was demonstrated on public roads for the first time at a media event held in Japan in November 2013. The Leaf drove on the Sagami Expressway in Kanagawa prefecture, near Tokyo. Nissan vice chairman Toshiyuki Shiga and the prefecture’s Governor, Yuji Kuroiwa, rode in the car during the test.[70][71]
Available in 2013, the 2014 Mercedes S-Class has options for autonomous steering, lane keeping, acceleration/braking, parking, accident avoidance, and driver fatigue detection, in both city traffic and highway speeds of up to 124 miles (200 km) per hour.[72][73][74][75]
Released in 2013, the 2014 Infiniti Q50 uses cameras, radar and other technology to deliver various lane-keeping, collision avoidance and cruise control features. One reviewer remarked, "With the Q50 managing its own speed and adjusting course, I could sit back and simply watch, even on mildly curving highways, for three or more miles at a stretch," adding that he wasn't touching the steering wheel or pedals.[76]
Although as of 2013, fully autonomous vehicles are not yet available to the public, many contemporary car models have features offering limited autonomous functionality. These include adaptive cruise control, a system that monitors distances to adjacent vehicles in the same lane, adjusting the speed with the flow of traffic; lane assist, which monitors the vehicle's position in the lane, and either warns the driver when the vehicle is leaving its lane, or, less commonly, takes corrective actions; and parking assist, which assists the driver in the task of parallel parking.[77]
In January 2014, Induct Technology's Navia shuttle became the first self-driving vehicle to be available for commercial sale.[78] Limited to 12.5 miles per hour (20.1 km/h), the open-air electric vehicle resembles a golf cart and seats up to eight people. It is intended to shuttle people around "pedestrianized city centers, large industrial sites, airports, theme parks, university campuses or hospital complexes."[79]
On May 27, 2014, Google[80] announced plans to unveil 100 autonomous car prototypes built from scratch inside Google's secret X lab, as manifestations of years of work that began by modifying existing vehicles, along with, "in the next couple of years" according to Google in the above blog post, a pilot program similar to that which was used for the Cr-48 Chromebook back in 2010.
In October 2014 Tesla Motors announced its first version of AutoPilot. Model S cars equipped with this system are capable of lane control with autonomous steering, braking and speed limit adjustment based on signals image recognition. The system also provide autonomous parking and is able to receive software updates to improve skills over time.[81] As of March 2015, Tesla has been testing the autopilot system on the highway between San Francisco and Seattle with a driver but letting the car to drive the car almost unassisted.[82]
In February 2015, the UK Government announced it would oversee public trials of the LUTZ Pathfinder driverless pod in Milton Keynes.[83]

In March 2015 Tesla Motors announced that it will introduce its Autopilot technology by mid 2015 through a software update for the cars equipped with the systems that allow autonomous driving.[82] Some industry experts have raised questions about the legal status of autonomous driving in the U.S. and whether Model S owner would violate current state regulations when using the autopilot function. The few states that have passed laws allowing autonomous cars on the road limit their use for testing purposes, not the use by the general public. Also, there are questions about the liability for autonomous cars in case there is a mistake.[82] A Tesla spokesman said there is "nothing in our autopilot system that is in conflict with current regulations." "We are not getting rid of the pilot. This is about releasing the driver from tedious tasks so they can focus and provide better input." Google's director of self-driving cars at the company said he does not think there is a regulatory block as far as the self-driving vehicle met crash-test and other safety standards. A spokesman for the National Highway Traffic Safety Administration (NHTSA) said that "any autonomous vehicle would need to meet applicable federal motor vehicle safety standards" and the NHTSA "will have the appropriate policies and regulations in place to ensure the safety of this type of vehicles." [82]


In mid October 2015 Tesla Motors rolled out version 7 of their software in the U.S. that included Autopilot capability.[86] On January 9, 2016, Tesla rolled out version 7.1 as an over-the-air update, adding a new "summon" feature that allows cars to self-park at parking locations without the driver in the car.[87] Tesla's autonomous driving features are ahead of production cars, and can be classified as is somewhere between level 2 and level 3 under the NHTSA five levels of vehicle automation. At this levels the car can act autonomously but requires the full attention of the driver, who must be prepared to take control at a moment's notice.[88][89][90] Autopilot should be used only on limited-access highways, and sometimes it will fail to detect lane markings and disengage itself. In urban driving the system will not read traffic signals or obey stop signs. The system also does not detect pedestrians or cyclists.[84]
In February 2015 Volvo Cars announced its plans to lease 100 XC90 SUVs fitted with Drive Me Level 3 automation technology to residents of Gothenburg in 2017.[85][91] The Drive Me XC90s will be equipped with Nvidia’s Drive PX 2 supercomputer, and will be driven autonomously in certain weather conditions and on one road that loops around the city. As part of Volvo's Drive Me project, the 100 cars in the Sweden test will have an interface called IntelliSafe Auto Pilot, a feature that will let drivers activate and deactivate the autonomous mode through specially-designed paddles on the steering wheel. The interface was developed to oversee how drivers will transfer control to a car’s autonomous driving mode in future cars. Volvo considers autonomous driving systems as the tool that will help it meet the company's goal to have no one seriously injured or killed in a new Volvo by the year 2020.[92]

In April 2015, a car designed by Delphi Automotive became the first automated vehicle to complete a coast-to-coast journey across North America. It traveled from San Francisco to New York, under computer control for 99% of that distance.[94]
In July 2015, Google announced that the test vehicles in its driverless car project had been involved in 14 minor accidents since the project's inception in 2009. Chris Urmson, the project leader, said that all of the accidents were caused by humans driving other cars, and that 11 of the mishaps were rear-end collisions. "Our self-driving cars are being hit surprisingly often by other drivers who are distracted and not paying attention to the road. That’s a big motivator for us." Over the six years of the project's existence the test vehicles had logged nearly 2 million miles on the road.[93]
In April 2016 Volvo announced plans to deploy 100 XC90 self-driving cars to test them in everyday driving conditions in China in 2017.[92] Also in April 2016, the carmaker announced plans to begin a trial in London in 2017 with 100 Volvo XC90 plug-in hybrids fitted with Drive Me technology. The XC90s will be leased to everyday users, and the self-driving cars will log each and every journey, passing on that data to Thatcham Research, which will conduct a thorough analysis to examine how the car behaves in everyday situations as well as understanding how other road users and the car’s occupants respond to autonomous driving decisions made by the car.[95]
The first known fatal accident involving a vehicle being driven by itself took place in Williston, Florida on 7 May 2016 while a Tesla Model S electric car was engaged in Autopilot mode. The driver was killed in a crash with a large 18-wheel tractor-trailer. On 28 June 2016 the National Highway Traffic Safety Administration (NHTSA) opened a formal investigation into the accident working with the Florida Highway Patrol. According to the NHTSA, preliminary reports indicate the crash occurred when the tractor-trailer made a left turn in front of the Tesla at an intersection on a non-controlled access highway, and the car failed to apply the brakes. The car continued to travel after passing under the truck’s trailer.[96][97][98] The NHTSA's preliminary evaluation was opened to examine the design and performance of any automated driving systems in use at the time of the crash, which involves a population of an estimated 25,000 Model S cars.[99]
In August 2016 Singapore launched the first self-driving taxi service, provided by nuTonomy.[100]
Starting October 2016, all Tesla cars are built with the necessary hardware to allow full self-driving capability at a safety level (SAE Level 5). The hardware includes eight surround cameras and twelve ultrasonic sensors, in addition to the forward-facing radar with enhanced processing capabilities.[101] The system will operate in "shadow mode" (processing without taking action) and send data back to Tesla to improve its abilities until the software is ready for deployment via over-the-air upgrades.[102] Full autonomy is only likely after millions of miles of testing, and approval by authorities. Tesla Motors says it expects to enable full self-driving by the end of 2017.[103]
Notable projects

- The DARPA Grand Challenge was held in 2004, 2005 and 2007 as an autonomous driving competition with millions of dollars in prize money.[46]
- In 2011, Google autonomous car has finished a total of 140,000 miles including highways and city streets without a single accident.[104]
- The Google driverless car project maintains a test fleet of autonomous vehicles that has driven 300,000 miles (480,000 km) with no machine-caused accidents as of August 2012.[11] By April 2014 700,000 autonomous miles (1,100,000 km) were logged.[105]
- The €800 million EC EUREKA Prometheus Project conducted research on autonomous vehicles from 1987 to 1995. Among its culmination points were the twin robot vehicles VITA-2 and VaMP of Daimler-Benz and Ernst Dickmanns, driving long distances in heavy traffic.
- The $90 million Automated Highway System program demonstrated vehicle automation to thousands at Demo '97 in San Diego, California.
- The 2010 VIAC Challenge saw four autonomous vehicles drive from Italy to China on a 100-day 9,900-mile (15,900 km) trip with only limited human intervention, such as in traffic jams and when passing toll stations.[106] At the time, this was the longest-ever journey conducted by an unmanned vehicle.[106]
- The ARGO vehicle (see History above) is the predecessor of the BRAiVE vehicle, both from the University of Parma's VisLab. Argo was developed in 1996 and demonstrated to the world in 1998; BRAiVE was developed in 2008 and demonstrated in 2009 at the IEEE IV conference in Xi'an, China.
- In 2012, Stanford's Dynamic Design Lab, in collaboration with the Volkswagen Electronics Research Lab, produced Shelley, an Audi TTS designed for high speed (greater than 100 miles per hour (160 km/h)) on a racetrack course.[107]
- Oxford University's 2011 WildCat Project created a modified Bowler Wildcat which is capable of autonomous operation using a flexible and diverse sensor suite.[108][109]
- The Volkswagen Golf GTI 53+1 is a modified Volkswagen Golf GTI capable of autonomous driving.[110][111][112] In his 2010 book, Democracy and the Common Wealth, Michael E. Arth claims that autonomous cars could become universally adopted if almost all private cars requiring drivers, which are not in use and parked 90% of the time, were traded for public self-driving taxis, which would be in near-constant use.[113]
- AutoNOMOS – part of the Artificial Intelligence Group of the Freie Universität Berlin[114]
- Toyota has developed prototype cars with autonomous capabilities for demonstration at the 2013 Consumer Electronics Show.[9]
- In February 2013, Oxford University unveiled the RobotCar UK project, an inexpensive autonomous car capable of quickly switching from manual driving to autopilot on learned routes.[10][115][116]
- Israel has significant research efforts to develop a fully autonomous border-patrol vehicle. This originated with its success with Unmanned Combat Air Vehicles, and following the construction of the Israeli West Bank barrier. Two projects, by Elbit Systems and Israel Aircraft Industries, are based on the locally produced Armored "Tomcar" and have the specific purpose of patrolling barrier fences against intrusions.
- The Oshkosh Corporation developed an autonomous military vehicle called TerraMax and is integrating its systems into some future vehicles.
- 2015, Apple electric car (iCar) project with autonomous driving is called Project Titan.[117][118]
- In 2015 Uber announced a partnership with Carnegie Mellon to develop its own autonomous cars.[119][120]
See also
References
- 1 2 "'Phantom Auto' will tour city". The Milwaukee Sentinel. Google News Archive. 8 December 1926. Retrieved 23 July 2013.
- ↑ "Carnegie Mellon". Navlab: The Carnegie Mellon University Navigation Laboratory. The Robotics Institute. Retrieved 2014-12-20.
- ↑ Kanade, Takeo (February 1986). "Autonomous land vehicle project at CMU". CSC '86 Proceedings of the 1986 ACM fourteenth annual conference on Computer science. doi:10.1145/324634.325197.
- ↑ Wallace, Richard (1985). "First results in robot road-following" (PDF). JCAI'85 Proceedings of the 9th international joint conference on Artificial intelligence.
- 1 2 3 Schmidhuber, Jürgen (2009). "Prof. Schmidhuber's highlights of robot car history". Retrieved 15 July 2011.
- ↑ "Video Friday: Bosch and Cars, ROVs and Whales, and Kuka Arms and Chainsaws". IEEE Spectrum. 25 January 2013. Retrieved 26 February 2013.
- 1 2 "Audi of America > news > Pool > Reaffirmed Mission for Autonomous Audi TTS Pikes Peak". AudiUSA.com. Retrieved 28 April 2012.
- ↑ "Nissan car drives and parks itself at Ceatec". BBC. 4 October 2012. Retrieved 4 January 2013.
- 1 2 3 "Toyota sneak previews self-drive car ahead of tech show". BBC. 4 January 2013. Retrieved 4 January 2013.
- 1 2 "Doing the school run just got easier! Nissan unveils new car that can drive itself on short journeys". Daily Mail. London. 14 February 2013. Retrieved 14 February 2013.
- 1 2 "Google's Self-Driving Cars: 300,000 Miles Logged, Not a Single Accident Under Computer Control". The Atlantic. Retrieved 10 August 2012.
- ↑ "Vislab, University of Parma, Italy - 8000 miles driverless test begins". Retrieved 27 October 2013.
- ↑ "VisLab Intercontinental Autonomous Challenge: Inaugural Ceremony – Milan, Italy". Retrieved 27 October 2013.
- ↑ "Vislab, University of Parma, Italy - Public Road Urban Driverless-Car Test 2013 - World premiere of BRAiVE".
- ↑ Muller, Joann. "With Driverless Cars, Once Again It Is California Leading The Way". Forbes. 26 September 2012. Retrieved 12 March 2013.
- ↑ "Nevada enacts law authorizing autonomous (driverless) vehicles". Green Car Congress. 25 June 2011. Retrieved 25 June 2011.
- ↑ Alex Knapp (22 June 2011). "Nevada Passes Law Authorizing Driverless Cars". Forbes. Archived from the original on 28 June 2011. Retrieved 25 June 2011.
- ↑ John Markoff (10 May 2011). "Google Lobbies Nevada To Allow Self-Driving Cars". The New York Times. Retrieved 11 May 2011.
- ↑ "Autonomous Vehicles". State of Nevada Department of Motor Vehicles. Retrieved 25 June 2013.
- ↑ "Driverless cars take to the road". E.U.CORDIS Research Program CitynetMobil. Retrieved 27 October 2013.
- ↑ "Snyder OKs self-driving vehicles on Michigan's roads". Detroit News. 27 December 2013. Retrieved 1 January 2014.
- ↑ "UK to allow driverless cars on public roads in January". BBC News.
- ↑ ""Phantom Auto" to Be Operated Here". The Free-Lance Star. Google News Archive. 17 June 1932. Retrieved 14 September 2013.
- ↑ O'Toole (2009) pp. 189-192
- ↑ Magic Motorways, by Norman Bel Geddes (from Prelinger Library)
- ↑ Magic motorways by Norman Bel Geddes, 1940. Full text, pages 43 to 56. Quote: "But these cars of 1960 and the highways on which they drive will have in them devices which will correct the faults of human beings as drivers. They will prevent the driver from committing errors. They will make it possible for him to proceed at full speed through dense fog."
- ↑ "Power companies build for your new electric living". The Victoria Advocate. 24 March 1957.
- ↑ "Autonomous Cars Will Make Us Safer". WIRED. 16 November 2009. Retrieved 20 October 2016.
- ↑ http://www.cspo.org/documents/article_Wetmore-DrivingTheDream.pdf
- ↑ Ingraham, Joseph C. (6 June 1960). "ELECTRONIC ROADS CALLED PRACTICAL". nytimes.com.
- ↑ "Reporter Rides Driverless Car". The Press-Courier. Google News Archive. 7 June 1960. Retrieved 21 July 2013.
- ↑ "This Automobile Doesn't Need Driver". Palm Beach Daily News. Google News Archive. 15 December 1966. Retrieved 23 July 2013.
- ↑ "DiSalle Seeks Road Funds In Washington". Toledo Blade. 3 August 1961.
- ↑ Reynolds, John (26 May 2001). "Cruising into the future". London: telegraph.co.uk.
- ↑ "How the first "driverless car" was invented in Britain in 1960". Yahoo! News. 17 July 2013. Retrieved 21 July 2013.
- ↑ "1960 Citroen DS19 - "Driverless car"". flickr.com. 12 August 2012.
- ↑ Biss,K., Chien,R.T., Stahl,F.A., Weissman,S., "Semantic Modeling for Deductive Question-Answering Systems", IEEE TRANSACTIONS ON COMPUTERS, C-25(4):358 - 366, APRIL 1976
- ↑ Pomerleau, Dean (1989). "ALVINN: an autonomous land vehicle in a neural network". Advances in Neural Information Processing Systems.
- ↑ Bishop, Richard (2005). Intelligent Vehicle Technologies and Trends. Boston: Artech House. p. 300. ISBN 978-1580539111.
- ↑ Robot Car | Raglan Tribe. YouTube. Retrieved 12 March 2013.
- ↑ No Hands Across America Home Page. Retrieved 4 February 2013.
- ↑ Albanesius, Chloe (October 11, 2010). "Google Car: Not the First Self-Driving Vehicle". PC Magazine.
- ↑ "ARGO Home Page". unipr.it.
- ↑ "4-D/RCS reference model architecture for unmanned ground vehicles" (PDF).
- ↑ Dudley, David (January 2015). "The Driverless Car Is (Almost) Here; The self-driving car — a godsend for older Americans — is now on the horizon". AARP The Magazine. AARP. Retrieved November 30, 2015.
- 1 2 3 Thrun, Sebastian. "Toward Robotic Cars." Communications of the ACM 53.4 (2010): 99–106. Computer & Applied Sciences Complete. Retrieved 24 October 2014.
- ↑ Park shuttle automated driverless vehicle. University of Washington. 2009. Retrieved 14 March 2013.
- ↑ McCue, Andy (26 January 2006). "RFID-tagged driverless cars on roads by 2056". Silicon.com. Retrieved 20 November 2011.
- ↑ "Driverless trucks by 2019". Roadsafetygb.org.uk. Retrieved 20 November 2011.
- ↑ Jones, W.D. "Keeping Cars from Crashing." IEEE Spectrum 38.9 (2001): 40–45.
- ↑ Jones, W.D. "Keeping Cars from Crashing." IEEE Spectrum 38.9 (2001): 40–45. Retrieved 24 October 2014.
- ↑ "Rio Tinto Expands Driverless Truck Fleet". 2 November 2011.
- 1 2 Harris, Mark (2014-09-10). "How Google's Autonomous Car Passed the First U.S. State Self-Driving Test". IEEE Spectrum. Institute of Electrical and Electronic Engineers. Retrieved 2014-09-13.
- ↑ Jack Carfrae (25 May 2010). "An automated adventure at the wheel of a driverless BMW - The National". Thenational.ae. Retrieved 28 April 2012.
- ↑ "The driverless car is coming. And we all should be glad it is." by Dan Niel Wall Street Journal. 24 September 2012.
- ↑ "EN-V electric networked car concept by GM begins pilot testing". DesignBoom.com. 14 October 2011. Retrieved 7 January 2013.
- ↑ "Driving Without a Driver - Volkswagen presents the "Temporary Auto Pilot"". Media.vw.com. Retrieved 28 April 2012.
- ↑ "Ford is ready for the autonomous car. Are drivers? – Mobile Technology News". Gigaom.com. 9 April 2012. Retrieved 28 April 2012.
- ↑ "Public Containerised Transport, ways to improve the efficiency and experience of travel by intermodalizing automobiles". Nordic Communications Corporation. 4 January 2013.
- ↑ "Without driver or map, vans go from Italy to China". Elaine Kurtenbac. Associated Press. Retrieved 5 February 2013.
- ↑ "Forschungsfahrzeug "Leonie" fährt automatisch auf dem Braunschweiger Stadtring". 5 October 2010. Retrieved 29 October 2014.
- ↑ FU Berlin (17 July 2013). "Brandenburg Gate Mission Accomplished - Autonomous Car Navigates the Streets of Berlin". FU Berlin. Retrieved 17 July 2013.
- ↑ Alberto Broggi (17 July 2013). "PROUD Car Test 2013". VisLab. Retrieved 17 July 2013.
- ↑ Hamilton, O.K., Breckon, T.P., Bai, X., Kamata, S. (September 2013). "A Foreground Object based Quantitative Assessment of Dense Stereo Approaches for use in Automotive Environments". Proc. International Conference on Image Processing (PDF). IEEE. pp. 418–422. Retrieved 19 November 2013.
- ↑ Daimler (8 September 2013). "Mercedes-Benz S 500 INTELLIGENT DRIVE". youtube. Retrieved 14 October 2013.
- ↑ Dan Neal (27 September 2013). "Driverless Cars for the Road Ahead". Wall Street Journal. Retrieved 14 October 2013.
- ↑ Nissan News (2013-08-28). "Nissan says it will have first commercially-viable autonomous drive vehicles by 2020; across the range in 2 vehicle generations". Green Car Congress. Retrieved 2014-03-05.
- ↑ Paul Stenquist (2013-08-29). "Nissan Announces Plans to Release Driverless Cars by 2020". The New York Times. Retrieved 2014-03-05.
- ↑ Nikki Gordon-Bloomfield (2013-09-26). "Nissan's Autonomous LEAF Granted License for Public Roads in Japan". PluginCars.com. Retrieved 2014-03-05.
- ↑ Jonathan Welsh (2013-12-02). "Self-Driving Nissan Electric Car Takes to Highway". The Wall Street Journal. Retrieved 2014-03-05.
- ↑ Alexis Santos (2013-11-26). "Nissan Leaf prototype becomes first autonomous car to hit Japanese highways (video)". Engadget.com. Retrieved 2014-03-05.
- ↑ Stenquist, Paul (25 October 2013). "On the Road to Autonomous, a Pause at Extrasensory". The New York Times. Retrieved 28 October 2013.
- ↑ Ewing, Jack (16 May 2013). "A Benz With a Virtual Chauffeur". The New York Times. Retrieved 19 May 2013.
- ↑ Ingraham, Nathan (18 May 2013). "Mercedes-Benz shows off self-driving car technology in its new $100,000 S-Class". The Verge. Retrieved 19 May 2013.
- ↑ English, Andrew (20 November 2012). "New Car Tech: 2014 Mercedes-Benz S-Class". Road & Track. Retrieved 13 April 2013.
- ↑ Ulrich, Lawrence (15 December 2013). "Feeling a Bit Obsolete in the Driver's Seat". The New York Times. Retrieved 18 December 2013.
- ↑ Daniel P. Howley (23 August 2012). "The Race to Build Self-Driving Cars". Laptop. Retrieved 12 March 2013.
- ↑ "Navia - The 100% Electric Automated Transport". Induct Technology. Retrieved 7 January 2014.
- ↑ "Official Google Blog: Just press go: designing a self-driving vehicle". Official Google Blog.
- ↑ JoshLowensohn. "This is Tesla's D: an all-wheel-drive Model S with eyes on the road". The Verge. Vox Media.
- 1 2 3 4 Aaron M. Kessler (2015-03-19). "Elon Musk Says Self-Driving Tesla Cars Will Be in the U.S. by Summer". The New York Times. Retrieved 2015-03-20.
- ↑ Burn-Callander, Rebecca (11 February 2015). "This is the Lutz pod, the UK's first driverless car". Daily Telegraph. Retrieved 11 February 2015.
- 1 2 Abuelsamid, Sam (2016-07-01). "Tesla Autopilot Fatality Shows Why Lidar And V2V Will Be Necessary For Autonomous Cars". Forbes. Retrieved 2016-07-01.
- 1 2 Stevens, Tim (2016-05-16). "Inside Volvo's self-driving car: Improving driver safety without the driver". CNET.com. Retrieved 2016-07-02.
- ↑ Nelson, Gabe (2015-10-14). "Tesla beams down 'autopilot' mode to Model S". Automotive News. Retrieved 2015-10-19.
- ↑ Zhang, Benjamin (2016-01-10). "ELON MUSK: In 2 years your Tesla will be able to drive from New York to LA and find you". Automotive News. Retrieved 2016-01-12.
- ↑ Charlton, Alistair (2016-06-13). "Tesla Autopilot is 'trying to kill me', says Volvo R&D chief". International Business Times. Retrieved 2016-07-01.
- ↑ Golson, Jordan (2016-04-27). "Volvo autonomous car engineer calls Tesla's Autopilot a 'wannabe'". The Verge. Retrieved 2016-07-01.
- ↑ Korosec, Kirsten (2015-12-15). "Elon Musk Says Tesla Vehicles Will Drive Themselves in Two Years". Fortune (magazine). Retrieved 2016-07-01.
- ↑ Ziegler, Chris (2015-02-23). "Volvo will run a public test of self-driving cars with 100 real people in 2017". The Verge. Retrieved 2016-07-02.
- 1 2 Korosec, Kirsten (2016-04-06). "Volvo Expands Its Self-Driving Car Experiment to China". Fortune (magazine). Retrieved 2016-07-02.
- 1 2 Titcomb, James (July 17, 2015). "Google blames careless humans after first driverless car injury". The Telegraph. Retrieved July 18, 2015.
- ↑ Isidore, Chris. "Driverless car finishes 3,400 mile cross-country trip". CNN Money. CNN. Retrieved 13 September 2015.
- ↑ Gordon-Bloomfield, Nikki (2016-04-27). "Volvo Launches Autonomous DriveMe Pilot Project in London, Hands Over Keys To 100 Self-Driving Plug-in Hybrids". Transport Evolved. Retrieved 2016-07-02.
- ↑ Yadron, Danny; Tynan, Dan (2016-07-01). "Tesla driver dies in first fatal crash while using autopilot mode". The Guardian. San Francisco. Retrieved 2016-07-01.
- ↑ Vlasic, Bill; Boudette, Neal E. (2016-06-30). "Self-Driving Tesla Involved in Fatal Crash". The New York Times. Retrieved 2016-07-01.
- ↑ Morris, David Paul (2016-07-01). "Highway patrol found DVD player in wreckage of fatal Tesla accident". Associated Press. CNBC. Retrieved 2016-07-01.
- ↑ Office of Defects Investigations, NHTSA (2016-06-28). "ODI Resume - Investigation: PE 16-007" (PDF). National Highway Traffic Safety Administration (NHTSA). Retrieved 2016-07-02.
- ↑ Watts, Jake Maxwell (25 August 2016). "World's First Self-Driving Taxis Hit the Road in Singapore - Singapore's nuTonomy debuts autonomous cabs, beating the likes of U.S. tech giants Uber and Google". The Wall Street Journal. Retrieved 7 September 2016.
- ↑ "Autopilot: Full Self-Driving Hardware on All Cars". Tesla Motors. Retrieved 2016-10-21.
- ↑ Guess, Megan (2016-10-20). "Teslas will now be sold with enhanced hardware suite for full autonomy". Ars Technica. Retrieved 2016-10-20.
- ↑ Lambert, Fred (2016-10-20). "Tesla's software timeline for 'Enhanced Autopilot' transition means 'Full Self-Driving Capability' as early as next year". Electrek. Retrieved 2016-10-20.
At “2 to 3 months from now”, Tesla expects .. the new software validation for the Autopilot features
- ↑ Brown, Alan S. "Google’s Autonomous Car Applies Lessons Learned from Driverless Races." Mechanical Engineering 133.2 (2011): 31. Computers & Applied Sciences Complete. Retrieved 24 October 2014.
- ↑ "Official Google Blog: The latest chapter for the self-driving car: mastering city street driving". Official Google Blog.
- 1 2 "Driverless van crosses from Europe to Asia". edition.cnn.com. 18 October 2010. Archived from the original on 1 November 2010. Retrieved 19 November 2010.
- ↑ Bjorn Carey (14 August 2012). "Shelley, Stanford's robotic racecar, hits the track". R&D Magazine. Retrieved 9 September 2012.
- ↑ "WildCat homepage". Mobile Robotics Group. 2011. Retrieved 15 February 2013.
- ↑ "Robotic car developed by Oxford University". BBC. 10 October 2011. Retrieved 10 October 2011.
- ↑ "Volkswagen Golf GTI 53+1 info". Volkswagenag.com. 4 July 2006. Archived from the original on 15 December 2010. Retrieved 19 November 2010.
- ↑ Christian Steinert; The German Car Blog (21 May 2007). "VW Golf GTI 53+1 in action". Germancarblog.com. Retrieved 19 November 2010.
- ↑ "VW Golf GTI 53+1 overview". Engadget.com. Retrieved 19 November 2010.
- ↑ Arth, Michael E. (2010). Democracy and the Common Wealth: Breaking the Stranglehold of the Special Interests. Golden Apples Media. pp. 363–368. ISBN 978-0-912467-12-2.
- ↑ "Front page | AutoNOMOS - Autonomous Cars from Berlin". Autonomos.inf.fu-berlin.de. 13 October 2010. Retrieved 19 November 2010.
- ↑ "RobotCar UK homepage". Mobile Robotics Group. 14 February 2013. Retrieved 15 February 2013.
- ↑ "Self-driving car given UK test run at Oxford University". BBC. 14 February 2013. Retrieved 15 February 2013.
- ↑ Andrei Nedelea. "Apple Reportedly Working on Electric Minivan Internally Called "Project Titan"". Carscoops.
- ↑ Apple has 'several hundred' employees working on Project Titan electric car, Autoblog.
- ↑ "Uber Could Be First to Test Completely Driverless Cars in Public". spectrum.ieee.org. Retrieved 2015-11-02.
- ↑ "Uber and Carnegie Mellon University: A Deeper Partnership". Uber Global. Retrieved 2015-11-02.