Point in polygon
In computational geometry, the point-in-polygon (PIP) problem asks whether a given point in the plane lies inside, outside, or on the boundary of a polygon. It is a special case of point location problems and finds applications in areas that deal with processing geometrical data, such as computer graphics, computer vision, geographical information systems (GIS), motion planning, and CAD.
An early description of the problem in computer graphics shows two common approaches (ray casting and angle summation) in use as early as 1974.[1]
An attempt of computer graphics veterans to trace the history of the problem and some tricks for its solution can be found in an issue of the Ray Tracing News.[2]
Ray casting algorithm
One simple way of finding whether the point is inside or outside a simple polygon is to test how many times a ray, starting from the point and going in any fixed direction, intersects the edges of the polygon. If the point is on the outside of the polygon the ray will intersect its edge an even number of times. If the point is on the inside of the polygon then it will intersect the edge an odd number of times. Unfortunately, this method won't work if the point is on the edge of the polygon.
This algorithm is sometimes also known as the crossing number algorithm or the even-odd rule algorithm, and is known as early as 1962.[3] The algorithm is based on a simple observation that if a point moves along a ray from infinity to the probe point and if it crosses the boundary of a polygon, possibly several times, then it alternately goes from the outside to inside, then from the inside to the outside, etc. As a result, after every two "border crossings" the moving point goes outside. This observation may be mathematically proved using the Jordan curve theorem.
If implemented on a computer with finite precision arithmetics, the results may be incorrect if the point lies very close to that boundary, because of rounding errors. This is not normally a concern, as speed is much more important than complete accuracy in most applications of computer graphics. However, for a formally correct computer program, one would have to introduce a numerical tolerance ε and test in line whether P (the Point) lies within ε of L (the Line), in which case the algorithm should stop and report "P lies very close to the boundary."
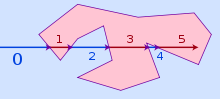
Most implementations of the ray casting algorithm consecutively check intersections of a ray with all sides of the polygon in turn. In this case the following problem must be addressed. If the ray passes exactly through a vertex of a polygon, then it will intersect 2 segments at their endpoints. While it is OK for the case of the topmost vertex in the example or the vertex between crossing 4 and 5, the case of the rightmost vertex (in the example) requires that we count one intersection for the algorithm to work correctly. A similar problem arises with horizontal segments that happen to fall on the ray. The issue is solved as follows: If the intersection point is a vertex of a tested polygon side, then the intersection counts only if the second vertex of the side lies below the ray. This is effectively equivalent to considering vertices on the ray as lying slightly above the ray.
Once again, the case of the ray passing through a vertex may pose numerical problems in finite precision arithmetics: for two sides adjacent to the same vertex the straightforward computation of the intersection with a ray may not give the vertex in both cases. If the polygon is specified by its vertices, then this problem is eliminated by checking the y-coordinates of the ray and the ends of the tested polygon side before actual computation of the intersection. In other cases, when polygon sides are computed from other types of data, other tricks must be applied for the numerical robustness of the algorithm.
Winding number algorithm
Another algorithm is to compute the given point's winding number with respect to the polygon. If the winding number is non-zero, the point lies inside the polygon. One way to compute the winding number is to sum up the angles subtended by each side of the polygon.[4] However, this involves costly inverse trigonometric functions, which generally makes this algorithm slower than the ray casting algorithm. Luckily, these inverse trigonometric functions do not need to be computed. Since the result, the sum of all angles, can add up to 0 or (or multiples of ) only, it is sufficient to track through which quadrants the polygon winds,[5] as it turns around the test point, which makes the winding number algorithm comparable in speed to counting the boundary crossings.

There is a significant speed-up (known since 2001) of the winding number algorithm. It uses signed crossings, based on whether each crossing is left-to-right or right-to-left. Details and C++ code are given at .[6] Angles are not used, and no trigonometry is involved. The code is as fast as the simple boundary crossing algorithm. Further, it gives the correct answer for nonsimple polygons, whereas the boundary crossing algorithm fails in this case.
Comparison
For simple polygons, both algorithms will always give the same results for all points. However, for complex polygons, the algorithms may give different results for points in the regions where the polygon intersects itself, where the polygon does not have a clearly defined inside and outside. In this case, the former algorithm is called the even-odd rule. One solution is to transform (complex) polygons in simpler, but even-odd-equivalent ones before the intersection check.[7] This, however, is computationally expensive. It is better to use the fast "signed crossings" winding number algorithm which gives the correct result, even when the polygon overlaps itself. The point is then inside the polygon whenever the winding number is nonzero.
Point in polygon queries
The point in polygon problem may be considered in the general repeated geometric query setting: given a single polygon and a sequence of query points, quickly find the answers for each query point. Clearly, any of the general approaches for planar point location may be used. Simpler solutions are available for some special polygons.
Special cases
Simpler algorithms are possible for monotone polygons, star-shaped polygons, convex polygons and triangles.
The triangle case can be solved easily by use of a barycentric coordinate system, parametric equation or dot product.[8] The dot product method extends naturally to any convex polygon.
References
- ↑ Ivan Sutherland et al.,"A Characterization of Ten Hidden-Surface Algorithms" 1974, ACM Computing Surveys vol. 6 no. 1.
- ↑ "Point in Polygon, One More Time...", Ray Tracing News, vol. 3 no. 4, October 1, 1990.
- ↑ Shimrat, M., "Algorithm 112: Position of point relative to polygon" 1962, Communications of the ACM Volume 5 Issue 8, Aug. 1962
- ↑ Hormann, K.; Agathos, A. (2001). "The point in polygon problem for arbitrary polygons". Computational Geometry. 20 (3): 131. doi:10.1016/S0925-7721(01)00012-8.
- ↑ Weiler, Kevin (1994), "An Incremental Angle Point in Polygon Test", in Heckbert, Paul S., Graphics Gems IV, San Diego, CA, USA: Academic Press Professional, Inc., pp. 16–23, ISBN 0-12-336155-9.
- ↑ Sunday, Dan (2001), Inclusion of a Point in a Polygon.
- ↑ Michael Galetzka, Patrick Glauner (2017). A Simple and Correct Even-Odd Algorithm for the Point-in-Polygon Problem for Complex Polygons. Proceedings of the 12th International Conference on Computer Graphics Theory and Applications (GRAPP 2017).
- ↑ Accurate point in triangle test "...the most famous methods to solve it"
See also
- Java Topology Suite (JTS)
- Discussion: http://www.ics.uci.edu/~eppstein/161/960307.html
- Winding number versus crossing number methods: http://geomalgorithms.com/a03-_inclusion.html
| Wikibooks has a book on the topic of: Category:Point-in-polygon problem |